AI时代车企的升维之战
AI 技术发展加速,形成云侧 AI 与端侧 AI 两条路线 年 Open AI 推出建立在 GPT-3.5 和 GPT-4.0 大语言模型上的聊天ChatGPT 后,AI 技术取得了飞速的发展及应用,春节期间 DeepSeek 模型引爆全球关注。目前 AI 技术部署形成了云侧 AI 和端侧 AI 两条路线,端侧 AI 凭借本地即时响应、数据隐私保护及个性化体验的优势,适用场景更为广泛。
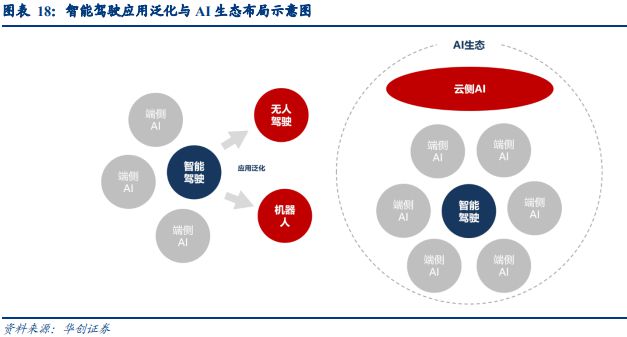
车企是端侧 AI 核心玩家,智驾是最前沿、近变现的 AI 技术。智能驾驶是融合了先进传感器、人工智能、通信、自动控制等多种技术,使车辆能够在不同程度上实现自主感知、决策与控制,从而完成驾驶任务的综合性技术。随着 AI 大模型的发展,2023 年特斯拉提出利用端到端技术实现智能驾驶,随后国内 华为、理想、小鹏等企业在端到端智驾上快速切换。2025 年将是高阶城市 NOA 功能加速应用的一年,新势力车企也相继表态在 AI 领域深入布局。未来趋势上:1)车企或以智能驾驶为锚点,进行横向应用场景泛化或自下而 上构筑 AI 生态;2)涉足汽车的消费电子企业或从宏观体系/生态出发,既有云侧通用 AI 的大力投入,也兼容智能驾驶等端侧 AI 应用场景。
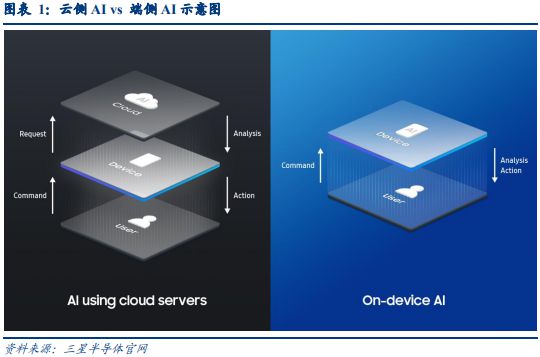
AI 技术发展加速,形成云侧 AI 与端侧 AI 两条路线 年 Open AI 推出建立在 GPT-3.5 和 GPT-4.0 大语言模型上的聊天机器人 ChatGPT 后,AI 技术取得了飞速的发展 及应用,深刻改变人们的生活及工作方式。在 AI 技术的实际应用中,云侧 AI 和端侧 AI 成为了两种重要的部署方式:1)云侧 AI:依托强大的云端数据中心,集中进行大规模的数据处理和模型训练,凭借其 海量的计算资源和存储能力,能够实现复杂的AI 任务,如大规模的数据分析、自然语言处理中的复杂语义理解等。
2)端侧 AI:将 AI 算法和模型直接部署在终端设备上,如智能手机、智能穿戴设备、智 能家居设备等,使终端设备具备自主的智能处理能力,能够在本地实时响应用户需求, 如手机的实时语音识别、图像美化等功能。
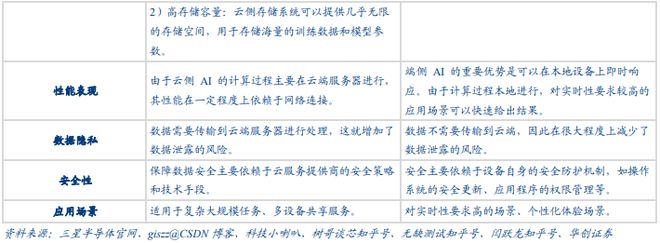
与云侧 AI 相比,端侧 AI 在本 地即时响应、数据隐私保护、个性化体验上具备优势。相反,云侧AI 在处理复杂任务以 及通用性上能力更强。端侧 AI 在包括智能手机、PC、平板、汽车、穿戴设备以及物联网 等不同终端产品上均有发展,落地场景更广泛。

出于不同的最终目标和适用场 景,不同企业的 AI 技术部署也在云侧 AI 和端侧 AI 上呈现不同侧重。互联网类、云计算 类企业或多从通用型 AI 技术(AGI)出发,在生成式AI上具备广阔前景。另一方面,高端制造、消费电子类企业或多从现实场景出发,在 AIOT方向深耕。而能力更强、战略规划更宏大的企业会考虑两端并进布局,形成云侧AI与端侧 AI 的统一。其中,特斯拉、 新势力,以及涉足汽车业务的华为、小米等均是 AI 行业核心玩家。

智能驾驶是融合了先进传感器、 人工智能、通信、自动控制等多种技术,使车辆能够在不同程度上实现自主感知、决策 与控制,从而完成驾驶任务的综合性技术。智能驾驶算法包括机器学习和深度学习相关 的 AI 算法。随着 AI 大模型的发展,2023 年特斯拉提出利用端到端技术实现智能驾驶, 随后国内华为、理想、小鹏等企业在端到端智驾上快速切换。
早期智能驾驶主要使用基于规则的技术路线,通过人工编写大量的规则 和算法来实现。该技术路线将智能驾驶任务分解为感知、决策和控制等独立的模块。在感知模块,利用传感器获取车辆周围环境的信息,然后通过算法对信息进行处理和分析,以识别出各种目标物体,如道路、行人、车辆等。在决策模块,根据预设的规则和逻辑,结合感知模块提供的信息,制定出相应的驾驶决策,例如何时加速、减速、转弯等。最后,在控制模块,将决策结果转化为具体的控制指令,实现对车辆的操控。
端到端技术路线是随着深度学习技术的发展而兴起的智能驾驶技术路径。它摒弃了传统的模块化设计思路,将传感器采集到的原始数据作为输入,通过一个庞大的深度学习模型,直接输出车辆的控制指令,实现从感知到决策的一体化。例如,端到端自动驾驶系统中,摄像头图像直接输入到神经网络模型,经过计算和处理,直接输出转向角度、油门开度和刹车力度等控制信号,无需中间的目标检测、识别和决策制定等独立步骤。
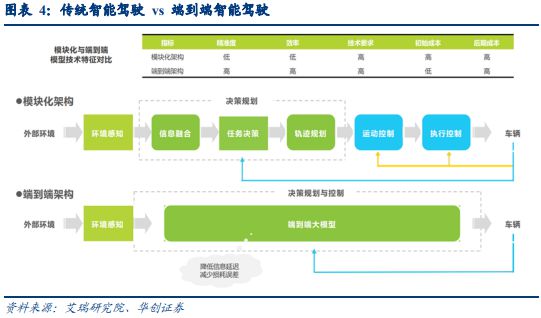
通过大量的数据训练,端到端模型能够自动学习到各种复杂的驾驶模式和场景特征,从 而在面对未知场景时也能做出较为合理的决策。此外,端到端系统的开发相对简单,不 需要繁琐的人工规则编写,能够加快智能驾驶技术的研发和迭代速度。
端到端架构被应用于智能驾驶技术后,不少车企已开始切换技术架构,在 2024 年完成具 备城市 NOA 功能的端到端智驾系统上线。而从代表企业的发展思路看,目光不仅聚焦在 智驾技术的迭代发展,也看到了对 AI 技术更深层次的思虑。
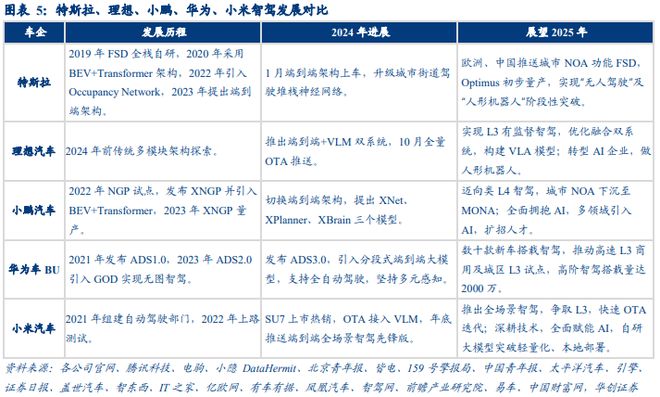
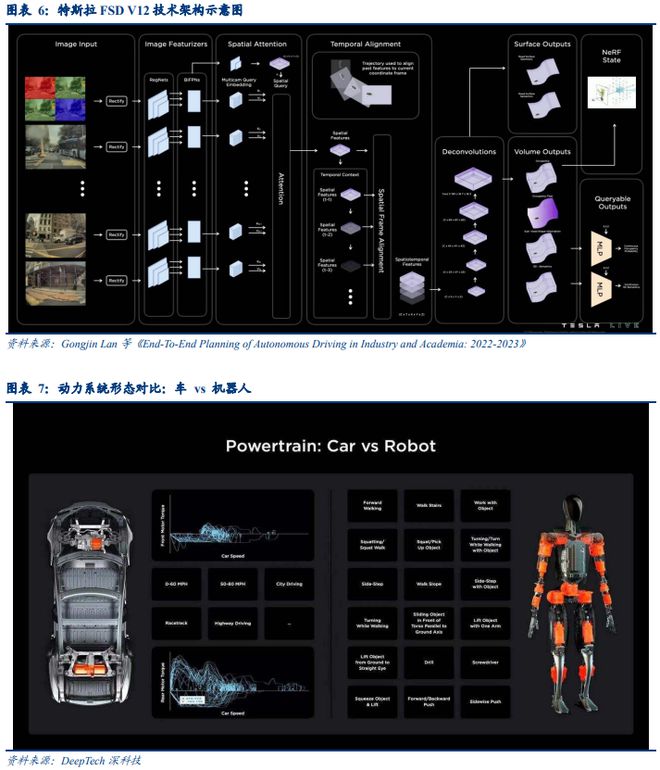
2019 年特斯拉推出基于自研芯片的 Hardware 3.0 后,FSD 功能正式进入全栈自研阶段,通过 OTA 不断提升其性能。2020 年,特斯拉采用 BEV+Transformer 架构并且实现数据自动标注,提高感知准确率和效率。2022 年,引入 Occupancy Network 技术,继续提升感知模块对障碍物的识别能力。2023 年提出端到端架构,并与 2024 年 1 月正式上车,实现了城市街道驾驶堆栈的端到端神经网络升级,被誉为自动驾驶的“ChatGPT”时刻。
特斯拉即将在欧洲、中国推送具备城市 NOA 功能的FSD,人形机器人 Optimus 也将初步量产。特斯拉从端侧 AI 出发,即将完成智驾终极形态“无人驾驶”以及类似端侧 AI“人形机器人”的阶段性突破。
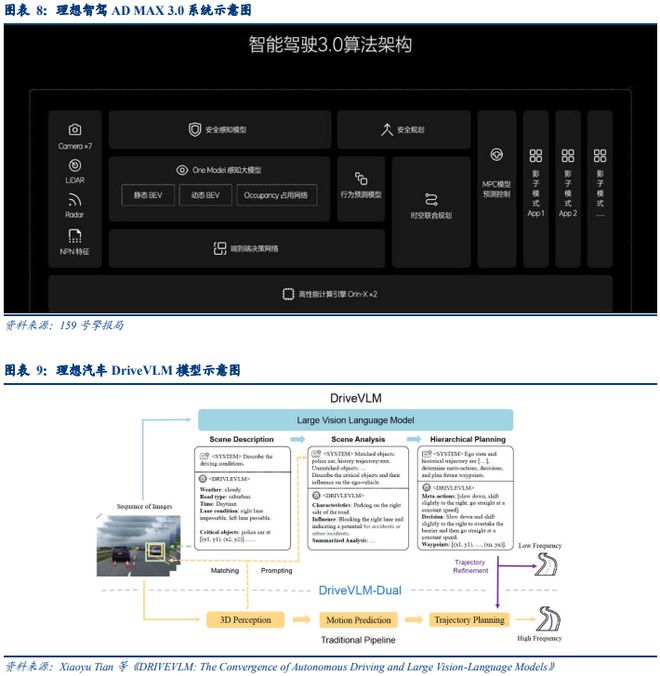
2024 年以前,理想在传统 多模块架构下进行智能驾驶技术探索。2024 年,理想推出基于端到端模型和 VLM(视觉 语言模型)的全新双系统自动驾驶技术架构。一段式端到端模型用于处理常规的驾驶行 为,VLM 视觉语言模型应对高难度的未知场景。2024 年 10 月,理想“端到端+VLM” 全量 OTA 推送,覆盖旗下 AD Max 配置车型。
理想计划实现 L3 有监督智能驾驶。端到端和 VLM 双系统解决方案不断 优化和融合,目标构建统一的 VLA(Vision Language Action Model)模型,将认知智能与空间智能相结合,使智能驾驶系统能够更好地理解和应对复杂的驾驶场景。此外,公司核心创始人李想表示,理想汽车将转型为 AI 企业,不做Robotaxi 但会做人形机器人。
2022 年,小鹏 NGP(高阶领航辅助功能) 开始在广州城区试点,成为国内城市 NOA 功能落地的先行者。同年,发布 XNGP 智驾 辅助系统,引入 BEV+Transformer 架构,于 2023 年率先量产。2024 年正式切换端到端架 构,提出三个模型:XNet(深度视觉感知神经网络)+XPlanner(神经网络规划大模型) +XBrain(AI 大语言模型)。
小鹏向类 L4 级别智能驾驶迈进,在特定场景和区域内实现高度自动化的 驾驶。同时,城市 NOA 功能将下沉推送至中低价格带的 MONA 产品上,实现低价纯视 觉城市领航辅助。此外,公司核心创始人何小鹏表示,将全面拥抱 AI。已在车端、智能 驾驶与智能座舱引入AI大模型,产品设计上引入 AI 进行优化,生产上 AI 机器人 Iron 已在广州工厂初步实践,未来会进入工厂更多岗位。公司也将扩招专业 AI 人才构建研发 团队。AI 体系囊括了机器人、汽车、飞行汽车、芯片和大模型。

2021 年,华为发布 ADS 1.0,基于 BEV+丰富传感器的架构实现智能驾驶。2023 年,ADS 2.0 问世,引入 GOD (Generalized Occupancy Network)对感知模块强化,实现无图智驾。2024 年,发布 ADS 3.0,引入分段式端到端大模型 GOD + PDP(感知+决策)架构,支持从停车位到停车位 的全自动驾驶,包括自动泊车和复杂环境中的自主导航。同时,不同于特斯拉坚持纯视 觉道路,华为 ADS 方案仍然保留了感知端的激光雷达信息,坚持多元感知路线 年:将有数十款新车型搭载华为智驾的新车上市。华为将协同国家标准与政策 法规等相关组织,共同推动高速 L3 商用及城区 L3 试点。此外,华为车 BU CEO 靳玉志 表示行业智驾发展超预期,一方面,有车企都开始宣传智驾,智驾从可选到必选,选配到标配;另一方面,智驾装配率不断提升,其中以高速领航为核心的 L2+在 20 万以上新能源车的配置率已达 65%。预计未来城区 NCA 为代表的高阶智驾渗透率将快速提升,未 来 5 年内搭载量将达到 2000 万。

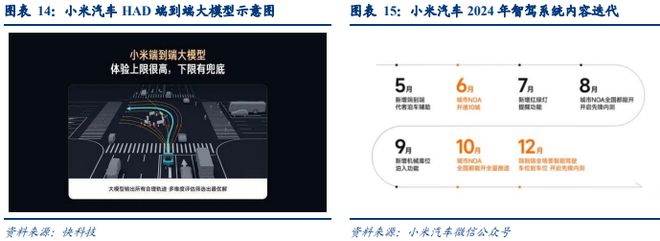
2024 年小米汽车首 款产品 SU7 上市即热销,但其智能驾驶能力较头部企业仍有差距。2021 年,小米汽车自 动驾驶部门开始组建;2022 年,开始上路测试自动驾驶技术;2024 年,在 1.4.5 版本 OTA 后接入 VLM 视觉语言大模型;2024 年末,开启端到端全场景智能驾驶先锋版推送。
展望 2025:小米将在 2025 年重点推出全场景智能驾驶功能,涵盖高速、城市道路和泊车 场景,争取进入 L3 阶段,同时通过更快的 OTA 迭代优化用户体验。此外,雷军 2023 年 宣布小米将深耕底层技术,长期持续投入,推动软硬深度融合,并全面赋能 AI,提出公 式(软件×硬件)。小米的自研大模型主要突破方向为“轻量化、本地部署”,既保障用户 的数据安全,又提升生产力。自 2016 年成立 AI 实验室以来,小米逐步布局了包括视觉、语音、NLP 等 12 个技术领域。小米集团预计在 2022-2026 年间将投入超过 1000 亿元的研发经费。
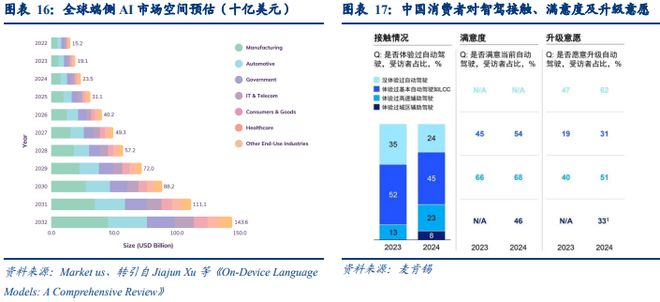
端侧 AI 前景广阔,有望实现十年十倍的发展。根据麦肯锡的调查报告,2024 年中国消 费者对智驾的接触、满意度以及升级意愿较 2023 年提升明显。消费者对智能驾驶的接受 度提升,进一步推动了市场渗透率的增长。而在车企技术迭代与应用泛化加速背景下, 2025 年智驾渗透率有望跳跃式突破。根据波士顿咨询研究,2025—2035 年智能驾驶汽车 的市场渗透率将从12.9%增长到 24.8%,具备智能驾驶功能的汽车市场规模从 420 亿美元增长至 770 亿美元。而从端侧 AI 角度出发,预测从 2022 年至 2032 年,全球端侧 AI 市场空间将从 152 亿美元提升至 1,436 亿美元,年复合增长率达 25.9%。其中增长将主要来自工业、汽车以及政府相关产业。
1)车企或以智能驾驶为锚点,进行横向应用场景泛化或自下而上 构筑 AI 生态;2)涉足汽车业务的消费电子企业或更多从宏观体系/生态出发,既有云侧 通用 AI 的大力投入,也兼容智能驾驶等端侧 AI 应用场景。
当下汽车/涉足汽车的消费企业不仅在智能驾驶这一端侧 AI 投入精力资源,正考虑不断深化与融合大模型技术,或为端侧 AI 能力的泛化奠定基础:车企进军无人驾驶、机器人 等,消费电子企业构建更全面的 AI 体系及终端生态。有别于生成式 AI 的内容产出,智能驾驶的终端产出是实时执行,这在现实物理世界或将有更丰富的落地场景。
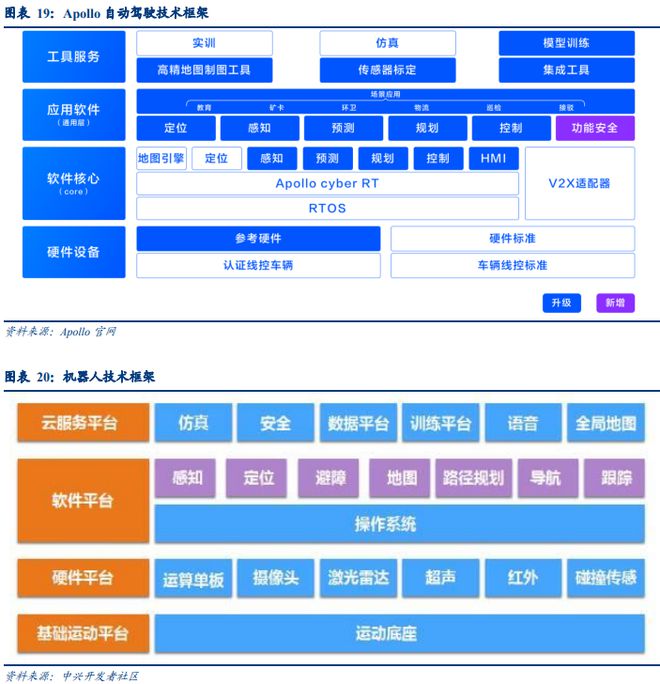
以自动驾驶和机器人为例对比,两者在技术框架上具备高度同源,汽车本身可视为一种非人形机器人。百度的自动驾驶分为四层技术栈,包括:云服务平台、开源软件平台、参考硬件平台和参考车辆平台。而机器人的技术框架也包含类似模块,区别则在于基础运动平台(即运动基座不同)。从技术角度,当前智能驾驶和机器人都采用了多传感器融合、人工智能深度学习、规划和运动控制的思路;从功能目标上,都以智能体自主决策行动和提高效率与安全为目的。不同点则在于应用场景和对象,软硬件配置和算法侧重上也有一定区别。
消费电子企业终 端产品更多、AI 落地内容或更丰富。例如:1)智能手机:智能助手、图像识别与处理、 语言翻译、智能写作辅助等。2)智能家居:家电控制、安全监控、能源管理等。3)智能 可穿戴设备:健康检测、运动辅助、智能导航等。上述应用场景也不仅局限于端侧 AI, 云侧 AI 的通用人工智能也可进行终端部署。消费电子企业的 AI 发展更多从体系生态角 度出发,终端设备仅是场景实现、交互的入口。
AI 时代,车企商业模式需要“升维”。随着 AI 技术的深入应用以及车企的布局延伸,我们预计车企商业模式将从硬件销售逐步迭代至“硬件+软件+服务”的综合模式。