
必一智能运动科技:自动驾驶中不可或缺的传感器融合技术(二):到底有多精确?
敲黑板,敲黑板了!上期我们了解到有一位自动驾驶界技术宅“多传感器融合技术”。这期,绝对的技术宅来啦!
简单的传感器融合不外乎就是每个传感器的数据能大致在空间跟时间上能得到对齐。而整个多传感器融合技术的核心就在于高精度的时间以及空间同步。精度到什么量级呢?
举个栗子,比如时间上能得到10的-6次方,空间上能得到在一百米外3到5厘米的误差,这是一个典型的技术指标。
当然,多传感器同步技术的难度与时间和空间的要求是一个指数级的增加。在百米外能得到3cm的空间精度,换算成角度是0.015度左右。

大家也知道在无人驾驶当中,毫米波雷达、相机、激光雷达和超声波都是完全不同的传感器,让他们在时域跟空域上得到这样的精度是非常难的,需要对机器人技术以及机器学习优化技术有非常深的理解。
自动泊车、公路巡航控制和自动紧急制动等自动驾驶汽车功能在很大程度上也是依靠传感器来实现的。
重要的不仅仅是传感器的数量或种类,它们的使用方式也同样重要。目前,大多数路面上行驶车辆内的ADAS都是独立工作的,这意味着它们彼此之间几乎不交换信息。只有把多个传感器信息融合起来,才是实现自动驾驶的关键。
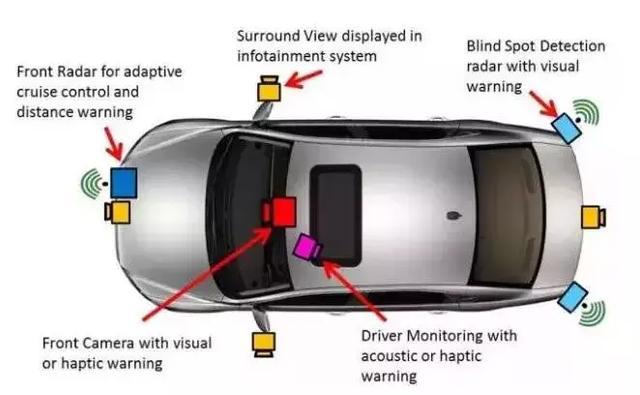
现在路面上的很多汽车,甚至是展厅内的很多新车,内部都配备有基于摄像头、雷达、超声波或LIDAR等不同传感器的先进驾驶员辅助系统(ADAS)。

这些系统的数量将会随着新法案的通过而不断增加,例如在美国,就有强制要求安装后视摄像头的法案。此外,诸如车险打折优惠和美国公路交通安全管理局(NHTSA)、欧洲新车安全评鉴协会(Euro-NCAP)等机构做出的汽车安全评级正在使某些系统成为汽车的强制功能;另一方面,这也助长了消费者对它们的需求。
目前,大多数路面上行驶车辆内的ADAS都是独立工作的,这意味着它们彼此之间几乎不交换信息。(没错,某些高端车辆具有非常先进的自动驾驶功能,不过这些功能还未普及)。后视摄像头、环视系统、雷达和前方摄像头都有它们各自的用途。通过将这些独立的系统添加到车辆当中,可以为驾驶员提供更多信息,并且实现自动驾驶功能。不过,你还可以突破限制,实现更多功能——参见图1。
仅仅通过多次使用相同种类的传感器无法克服每种传感器的缺点。反之,我们需要将来自不同种类传感器的信息组合在一起。工作在可见光谱范围内的摄像头CMOS芯片在浓雾、下雨、刺眼阳光和光照不足的情况下会遇到麻烦。而雷达缺少目前成像传感器所具有的高分辨率。我们可以在每种传感器中找到诸如此类的优缺点。





