必一运动:多传感器融合详解
多传感器融合(Multi-sensor Fusion, MSF)是利用计算机技术,将来自多传感器或多源的信息和数据以一定的准则进行自动分析和综合,以完成所需的决策和估计而进行的信息处理过程。和人的感知相似,不同的传感器拥有其他传感器不可替代的作用,当各种传感器进行多层次,多空间的信息互补和优化组合处理,最终产生对观测环境的一致性解释。
(2)对传感器的输出数据(离散或连续的时间函数数据、输出矢量、成像数据或一个直接的属性说明)进行特征提取的变换,提取代表观测数据的特征矢量Yi;
(3)对特征矢量Yi进行模式识别处理(如聚类算法、自适应神经网络或其他能将特征矢量Yi变换成目标属性判决的统计模式识别法等),完成各传感器关于目标的说明;
(5)利用融合算法将目标的各传感器数据进行合成,得到该目标的一致性解释与描述。
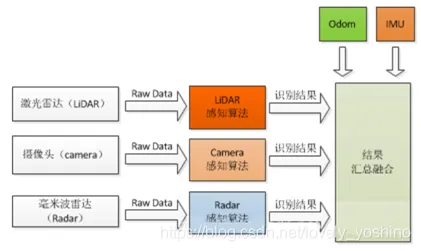
后端融合算法又被称为松耦合算法,本质上是对融合后的多维综合数据进行感知,如下图所示,后端融合算法是松散的,在出结果之前,所有的传感器都是独立的,不存在传感器与传感器的约束。
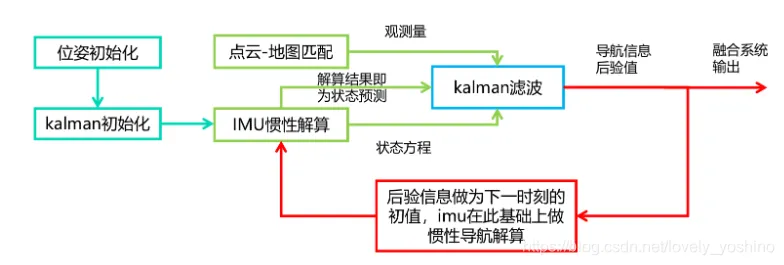
这种后端融合方法常见的融合策略是使用EKF或ESKF来实现(一般常见于LIO当中)。这样会导致
在信息技术不断发展的时代,无线传感器网络和物联网技术正成为推动智能化进程的重要支撑。本文将介绍无线传感器网络和物联网的基本概念,并探讨了它们融合应用在各个领域的前景和意义。从智能家居、智慧城市到工业制造,无线传感器网络与物联网的结合正引领着我们走向更智慧、便捷的未来。
【多传感器融合】BEVFusion: 激光雷达和摄像头融合框架 NeurIPS 2022
BEVFusion提出一个融合多摄像头和激光雷达数据的框架,可用于3D检测。在自动驾驶领域,通过独立处理并融合摄像头和激光雷达数据,可以显著提升3D对象检测的准确性和稳健性,尤其是在激光雷达可能出现故障的真实场景中。
在前面我们讲了《振弦传感器的发展及信息化的核心技术-VM系列振弦采集模块》中提到河北稳控科技研发并批量生产的激励测读模块(振弦采集模块),解决了振弦传感器由模拟信号直接转变为数字信号的问题。近两年来,振弦传感器的技术得到了进一点的提升,新技术的改变是围绕着使用者的习惯的改变,也不是所有的新技术都能让人接受,不过新技术是在原基础上改良,让学习使用成本非常低,而又带来极方便快捷的体验效果,应该是没人反对的了。
多传感器融合 CenterFusion:毫米波雷达和相机后融合3D检测算法
本文主要介绍一种基于毫米波雷达和相机后融合的3D目标检测算法——CenterFusion,原本是公司内部的一个技术方案,截取了其中的核心理论部分,所以看起来肯能有些严肃。
上面讲述了传统传感器的标签说明,现在我们来看看什么是电子标签模块。 电子标签专用读数模块TR01:可以读取振弦传感器内置的两线制电子标签,获取传感器数字信息(实时数据参考:传感器基本信息 厂商:WINCOM 品牌:GEO-INS 型号:YBJ300 类别:应变计 量程:0.000-1500.000uE 编号:206012 线Hz 传感器实时数据:信号幅值00%信号质值00% 数值-18.19uE 频率2092.1 频模4376.93 实时 温度 25.2C ),尺寸:18mm*15mm(非常小),嵌入到四线制振弦传感器中,
在前面我们讲了《振弦传感器的发展及信息化的核心技术-VM系列振弦采集模块》中提到河北稳控科技研发并批量生产的激励测读模块(振弦采集模块),解决了振弦传感器由模拟信号直接转变为数字信号的问题。近两年来,振弦传感器的技术得到了进一点的提升,新技术的改变是围绕着使用者的习惯的改变,也不是所有的新技术都能让人接受,不过新技术是在原基础上改良,让学习使用成本非常低,而又带来极方便快捷的体验效果,应该是没人反对的了。
ssh Permission denied (publickey,password).
Spring Security-全面详解(学习总结---从入门到深化)(上)
网络安全与信息安全:关于网络安全漏洞、加密技术、安全意识等方面的知识分享